

[CODE_4]: MEDIA_ELEMENT_ERROR: Format error












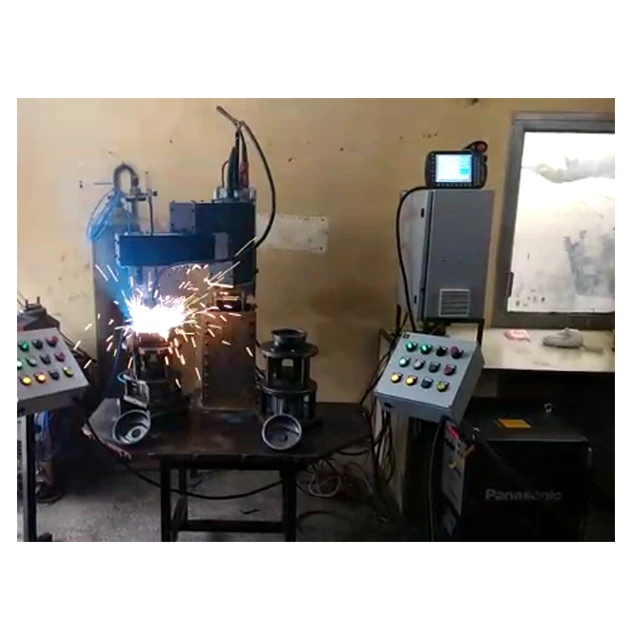


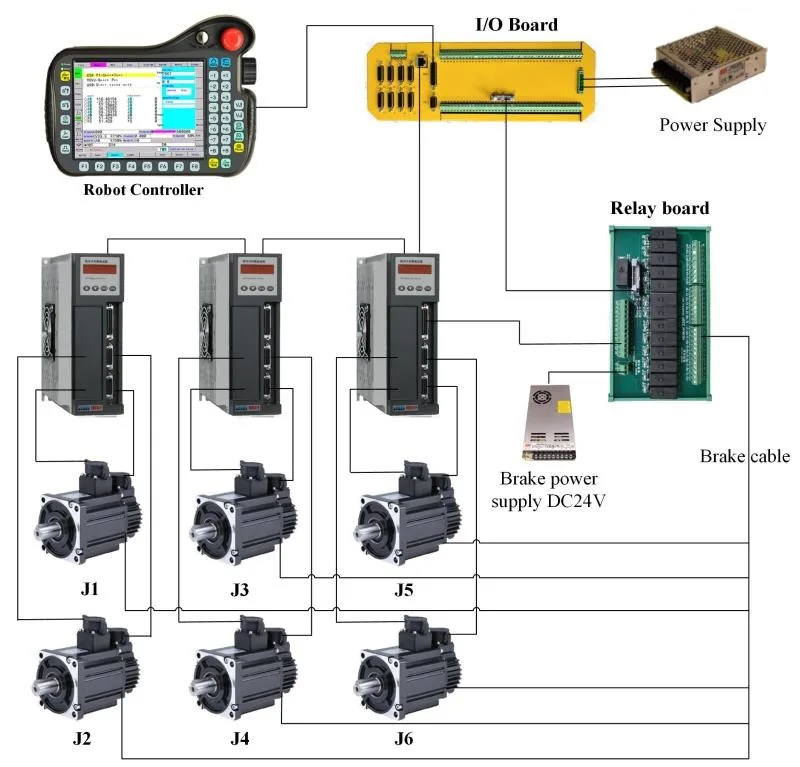

Jumlah controller poros | 4-8 axiscontrol panelof industri otomatis motoman arc welding robot(j1,j2,j3,j4,j5,j6) | Tentukan pengelasan saat ini: | AA/S | |
Jenis: | Bus mutlak jenis dan servo tipe | Tentukan pengelasan tegangan: | VV/SS | |
Paling programminng: | ± 99999.999 | Memulai pengelasan: | SEPERTI * | |
Encoder motor: | 16 bit dan 23bit | Akhir pengelasan: | AE * | |
I/O poin: | 48*32 I/O | Mulai ayunan weld: | WS * | |
0-10V analog: | 2 cara 0-10V analog | Swing weld: | KAMI | |
Operasi: | Mengajar Repaly,Remote | Gerakan sendi: | MJ atau MOVJ atau | |
Fungsi Wifi: | Terhubung dengan ponsel untuk mengirim program | Gerakan dari garis lurus: | ML atau MOVL atau G1 | |
RS 232 fungsi: | RS232 untuk terhubung dengan PC | Gerakan busur: | MC atau MOVC atau G6 | |
USB fungsi: | Update dan mengirim program | Tentukan kecepatan: | V = untuk menentukan kecepatan makan | |
Program mode: | Mengajar Kode G, Teknik parameter | Tentukan rasio: | VJ = untuk menentukan makan rasio | |
Fungsi gerak: | Titik ke titik, garis lurus, busur | Kecepatan berubah mengikuti :( kelancaran | PL = | |
Petunjuk: | Gerakan, Logika Perhitungan, Teknik, Kode G CNC | Mulai paralel terjemahan: | SN * | |
Sistem koordinat: | Sendi Pengguna Alat Dunia | Akhir paralel terjemahan: | SF | |
Fungsi PLC: | Mengedit tangga, 8000 langkah | Membaca posisi saat ini: | PK *** | |
Informasi Alarm: | Darurat, perawatan, kesalahan mulai busur dan koordinat | Menghitung nilai dua posisi: | PX *** = PT ***-PT *** | |
Batas fungsi: | Batas lembut | Mulai mencari: | ST * P * | |
Algoritma controller: | 1)Vertical multi joint serial tobot; 2) Vertikal articulated parallelogram robot; 3)Vertical multi joint L bentuk pergelangan tangan robot; 4) tiang koordinat robot; 5)SCARA robot; 6)Delta robot; 7) robot; | Akhir mencari | SE | |
Perlindungan Password: | Bertingkat acak password perlindungan | Lurus earching instruksi: | SX +/-,SY +/-,SZ +/-, | |
Pengguna macro program: | Memiliki | Paralel nilai: | PX *** = PX *** PX *** dan PX *** = PX ***-PX *** | |
Listrik gear fungsi: | Memiliki | Kode G: | Sama dengan standard cnc controller | |
Aplikasi: | Pengelasan, palletizing Lukisan, Merawat, Laser memotong dan khusus robor lengan | Marco program instruksi: | Jika .. MAKA;; PERGI; WAT |





Transaksi Anda di Cooig.com dilindungi dengan enkripsi SSL yang ketat dan protokol keamanan data PCI DSS.

Dapatkan pengembalian dana jika pesanan Anda tidak terkirim, hilang atau bermasalah.

Akses ke penggantian komponen gratis dan jaminan perbaikan
