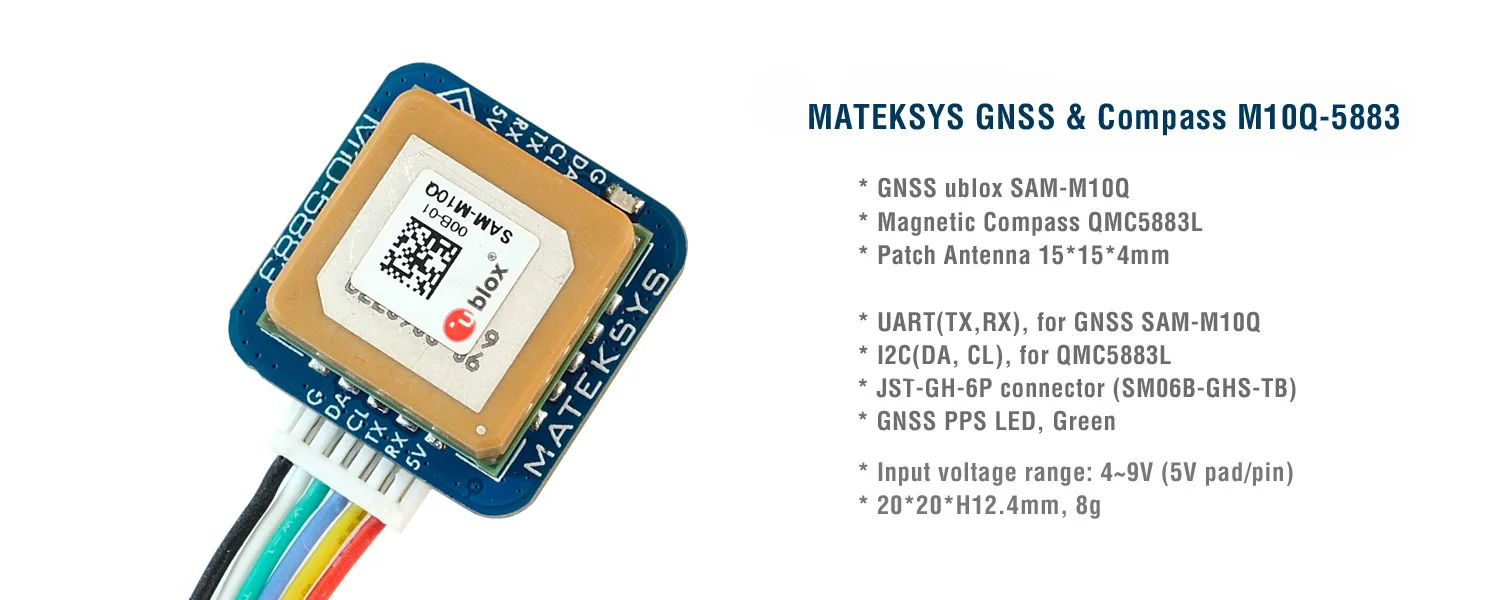
M10Q-5883 menggunakan modul GNSS multi-konstelasi yang didukung oleh SAM-M10Q-00B u-blox.
SAM-M10Q dilengkapi platform GNSS standar u-blox M10 dan memberikan sensitivitas luar biasa dan waktu akuisisi untuk semua sinyal L1 GNSS. SAM-M10Q mendukung penerimaan bersamaan dari empat GNSS (GPS, GLONASS, johaneo, dan BeiDou). Jumlah satelit yang terlihat memungkinkan penerima untuk memilih sinyal terbaik. Hal ini memaksimalkan ketersediaan posisi, khususnya di dalam kondisi yang menantang seperti di dalam perkotaan canyons. Teknologi u-blox super-s (Super-Signal) menawarkan sensitivitas RF yang bagus dan dapat meningkatkan akurasi posisi dinamis dalam skenario non-line-of-sight.
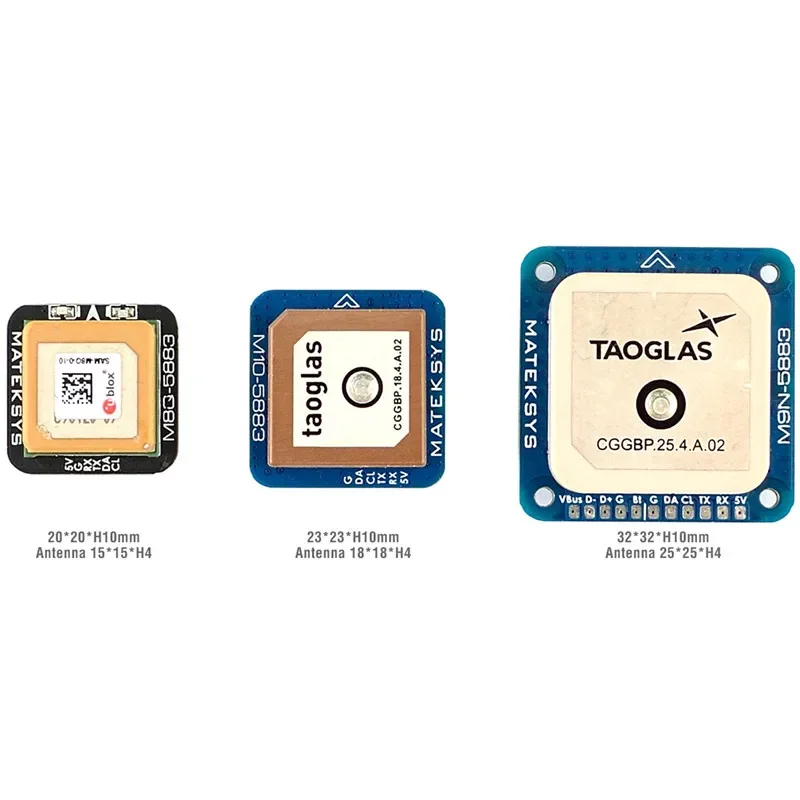
Antena patch 15x15 mm2 pendapatan tinggi memberikan keseimbangan terbaik antara kinerja dan ukuran kecil. Pola radiasi antena omnidirectional meningkatkan fleksibilitas untuk pemasangan perangkat
Rincian lebih lanjut tentang SAM-M10Q, silahkan cek halaman u-blox SAM-M10Q
Spesifikasi
GNSS u-blox SAM-M10Q-00B (GPS, GLONASS, Sahara EO dan BeiDou)
Kompas magnet Compass
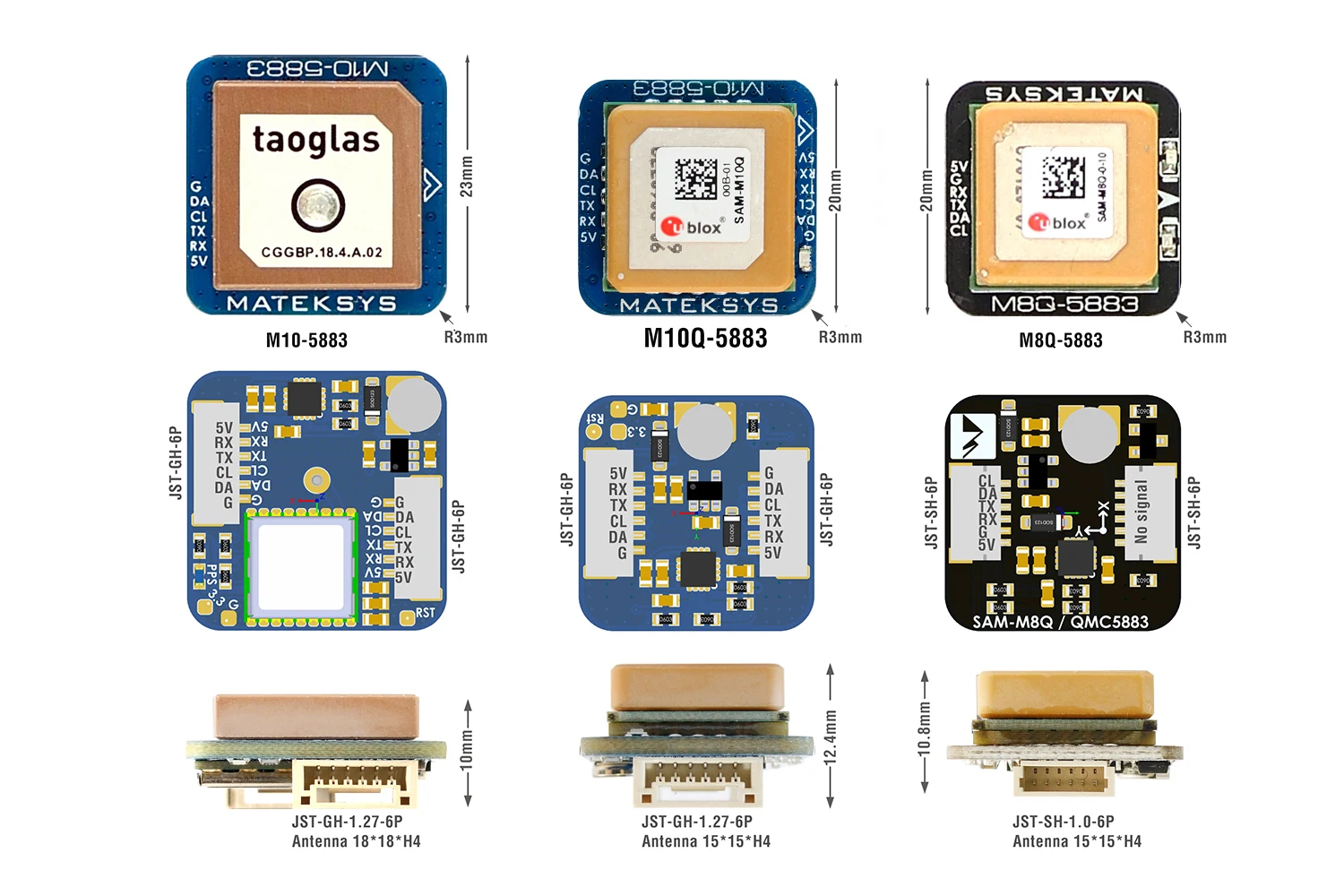
Antena Patch 15*15*4mm
Rentang tegangan Input: 4 ~ 9V (5V pad/pin)
Konsumsi daya: 13mA
UART baudrate: 9600 default
Suhu operasi: -20 ~ 80 °C
Antarmuka UART(TX, RX) untuk GNSS SAM-M10Q-00B
Antarmuka I2C(DA, CL) untuk Kompas QMC5883L
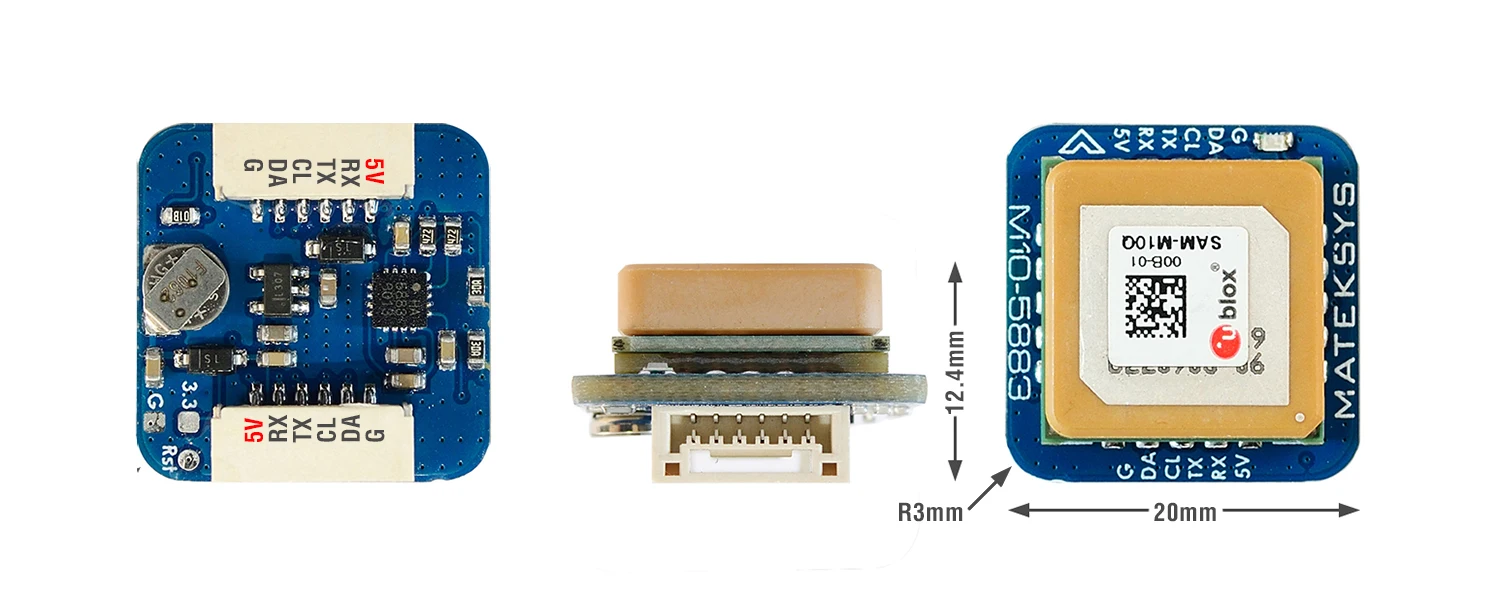
Konektor JST-GH-6P (SM06B-GHS-TB). Pitch 1.27mm
LED GNSS PPS, hijau (Solid ON setelah menyala, berkedip (1Hz) ketika GNSS mendapatkan 3D memperbaiki)
Protokol: UBX(u-blox) 5Hz @ GPS + GAL + BDS B1C + GLO atau ncla1 Hz
20mm * 20mm * 12.4mm
8g
M10Q-5883_step.zip
Termasuk
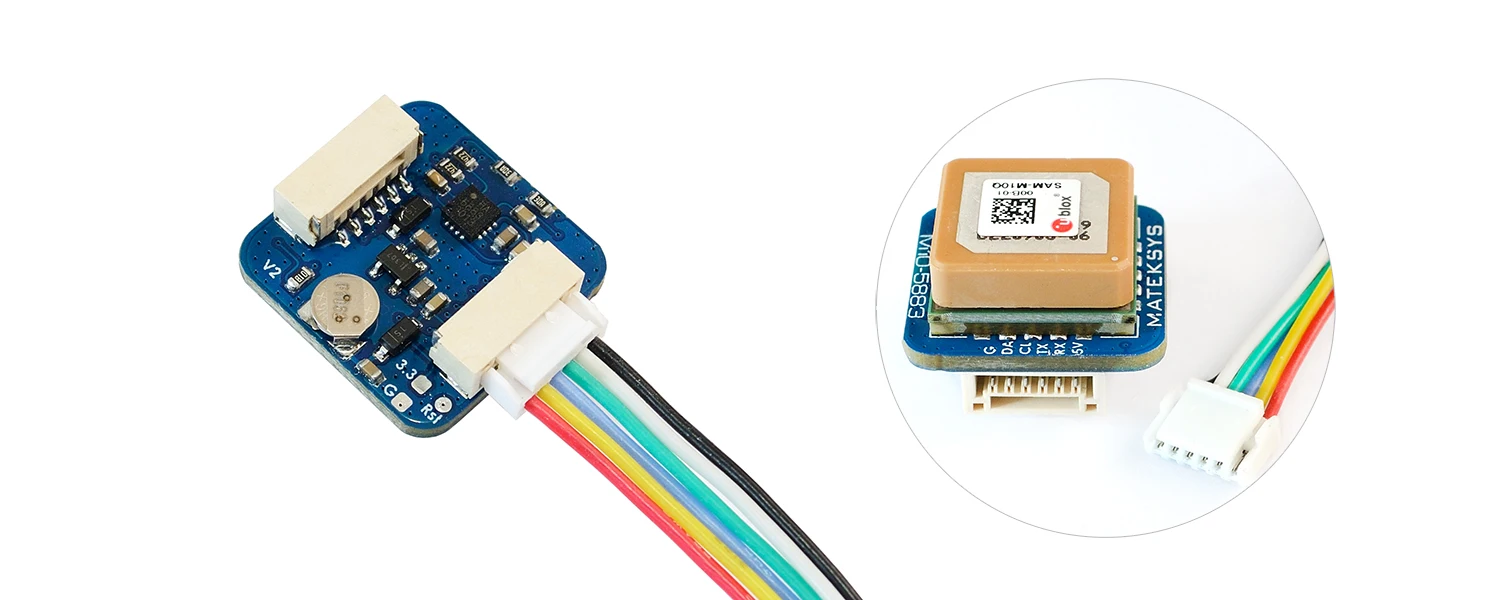
1x M10Q-5883
1x JST-GH-6P untuk JST-GH-6P 20cm kawat silikon
Kabel dan pengaturan
M10Q-5883 5V ke pengendali penerbangan 4 ~ 9V
Pengendali terbang RX to M10Q-5883 UART_TX
M10Q-5883 TX ke pengendali penerbangan UART_RX
M10Q-5883 CL ke Flight controller I2C_SCL
M10Q-5883 DA Ke pengendali penerbangan i2c_sdm
M10Q-5883 G ke Flight controller GND
Tips dan catatan
Penyelaras kompas (pemasangan pipih): menmiringkan magnetometer sangat berjaga-jaga!
INAV/BetaFLight: compass Arrow forward, set CW Flip 270 ° ketika panah pengontrol penerbangan menghadap ke depan.
INAV/BetaFLight: Kompas panah ke belakang, set CW 90 ° Flip ketika panah pengontrol penerbangan menghadap ke depan.
Ardupilot/rencana misi: rotasi tidak ada.
Pastikan Anda memiliki Kompas/magnetometer 10cm dari saluran listrik/ESC/Motor/bahan berbasis besi
-------
INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 atau yang lebih baru diperlukan.
UBlox NEO-M9N, MAX-M10S, seri SAM-M10Q semua tidak memiliki dataflash built in. Setelah GNSS mati dan kapasitor berjalan
Keluar. Pengaturan akan kembali ke default.
Protokol UBX adalah dua arah. Flight controller firmware dapat mengubah pengaturan pada GPS melalui UBX protocol. Anda tidak perlu mengatur GNSS
Parameter modul di u-center.
Konfigurasi default pada SAM-M10Q dengan ublox FW 5.1 adalah penerimaan GPS bersamaan, johaneo, GLONASS, dan BeiDou B1C dengan QZSS
Dan SBAS diaktifkan.
Mulai dengan u-blox GNSS FW3.01, timepulse selaras dengan waktu UTC dan waktu tersebut hanya berlaku setelah Lompatan detik diunduh.
Itu bisa memakan waktu hingga 12.5 Menit. Mungkin LED PPS tidak akan segera berkedip setelah GPS terpasang 3D.
M10Q-5883 menyediakan kemampuan untuk mengatur ulang penerima. Dikosongkan bantalan RST ke lantai setidaknya 100 ms akan terpicu dingin
Mulai. RESET akan menghapus semua informasi dan memicu penyalaan dingin. Seharusnya hanya digunakan sebagai pilihan pemulihan. Jika Anda yakin
Kabel dan pengaturan tidak beres. Tapi pengendali terbang tidak dapat mendeteksi modul GNSS (ikon GPS abu-abu), coba melakukan reset.
Goresan pada antena keramik adalah hasil penyetelan antena.
Mengatasi Masalah Terkait GPS: http://www.mateksys.com/?p=5712#tab-id-6
Jendela u-center
*** Cetak sutra SKU pada batch pertama M10Q-5883 PCB adalah "M10-5883".